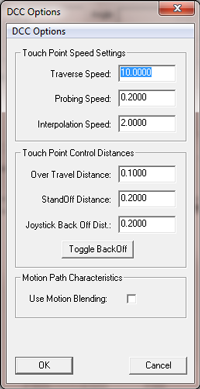
| Stand Off Distance (SO)
The Stand Off Distance is used to calculate the position of the SO automatically during the teaching of a motion path. During the process of teaching, whether on the CMM or offline using motion generation tools, the process of capturing a MP will create an SO before and after the MP in the motion path.
The Stand Off Distance should be set sufficient to allow the CMM time to transition from the Traverse Speed into the Probing Speed. In most cases this value could be set to 0.3" or 8mm. However, if the Traverse move is long such as 10" (254mm) or the Traverse Speed is high, transitioning into a short SO will not allow the inertia of the CMM structure to slow down and stabilize.
The SO position is calculated using the captured MP and the current direction to the last IP or SO. In the example shown at the right, the IP1 was recorded then the MP captured. Geomet will calculated the Pre and Post SO along the path from IP1 to MP and then inserted at the distance specified by the Stand Off Distance parameter.
There is a test that Geomet will perform prior to creating the SOs. Should the distance between IP1 and the MP be less than the distance specified the the Stand Off Distance parameter, the SOs will be created at the IP1 position. This ensures a tighter control when creating a motion path in areas of limited access on your inspection part.
Joystick Back off Distance
This parameter controls the back off distance the joystick will use when manually capturing an MP.
In most cases a value of 0.2" or 5mm is sufficient. However, conditions arise that these standard values will cause accidental contact during the retract as in a slot, small bore or other limited feature. Enter a new value into the control field and the motion controller will be updated with this value until changed.
Toggle BackOff 
This button provides a quick switch between the current backoff distance and 0.020" (0.5mm). Pressing this will download the new value and close the DCC Settings tool. |